
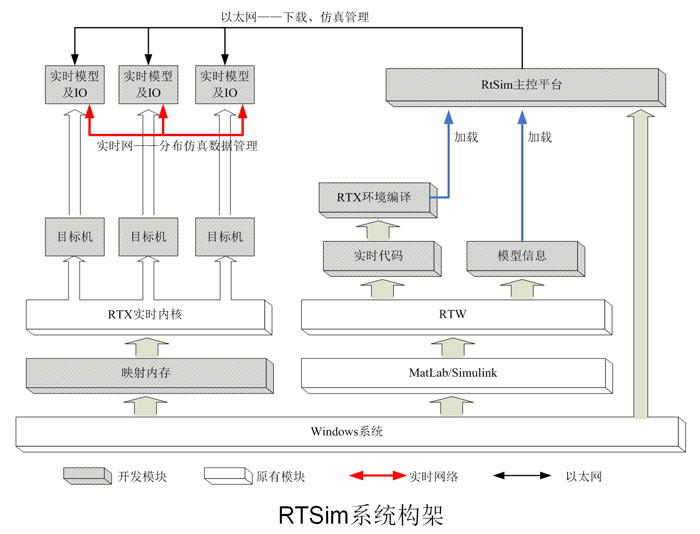
RTSim是实现xxxx控制系统研制、调试、测试与半实物仿真的重要技术手段,可实现控制系统原型样机的模块化设计、开发和仿真;实现数字模型到实时代码的自动转换和分布式实时仿真;具有丰富的硬件接口,实现数字模型与实物的互换,支持硬件在回路的半实物仿真;能够快速实现将SimuLink的MDL文件转化成RTX环境下的实时运行程序RTSS,完成将SimuLink模型实时化的分布、自动参数修改、数据存储,快捷应用于实时/半实物仿真,提高设计人员的工作效率。
软件包主要包括以下几部分:
● RTX环境下RTW实时代码模版生成文件(TLC)模块
● RTX环境下RTW实时代码模版联编文件(TMF)模块
● 实时程序入口文件(C/C++)模块
● RTX/Windwos通信库模块
● RTSim界面监控与管理模块
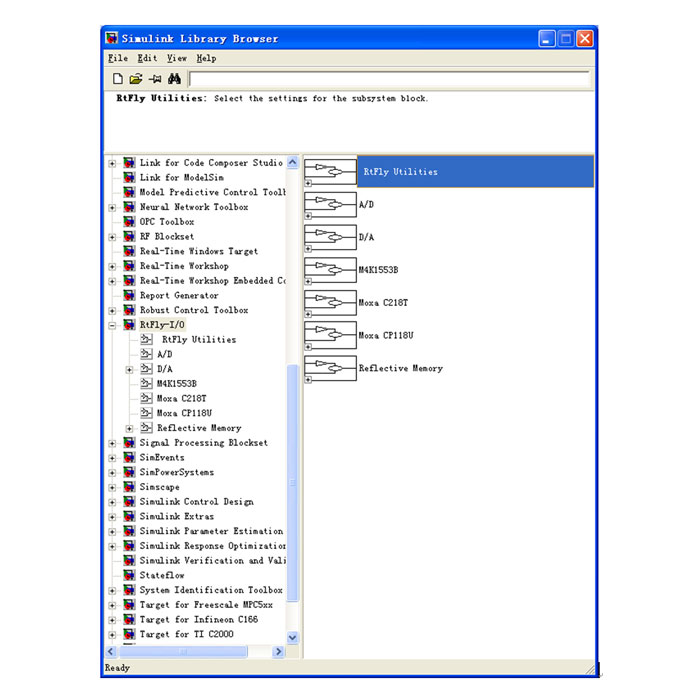
● SimuLink环境下IO驱动
● 模型编译与下载模块
● 网络下载与通信模块
● 数据显示与记录模块
● 工程文件管理模块
● 实时代码运行管理模块
● RTX实时开发与运行环境
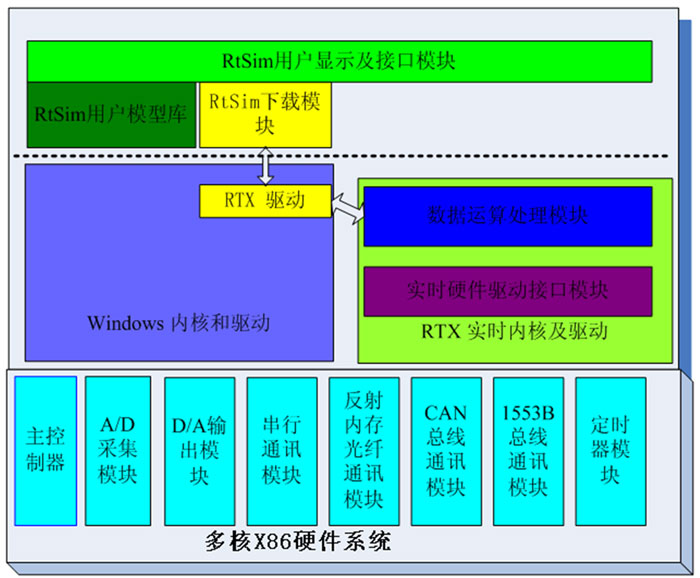
● 利用Windows+RTX的实时特性和RTSim管理软件的优点,提供一套开放的、开发简单的实时测控平台。
● 不对Windows系统本身做任何修改,即满足微秒级的实时特性,实时系统时间分辨率最小100ns。
● 支持多任务、多内核、独占CPU,微小实时内核。
● 基于VC开发环境实现工程配置、硬件配置、代码编辑、编译、支持实时驱动库。
● 构建CPCI架构的验证系统,优于2.4GHz处理能力,1G内存,功耗小于46W。
● 实时平台性能指标:
- 时钟分辨率0.1us
- 最小定时周期:1us
- 最大进程数量:1000个
- 最大线程数量:不限,取决于系统资源
- 线程优先级:128个
- 线程切换时间:0.5~2us
- 持续的中断响应频率:30KHz
- 最小定时器误差:<2us
- 编程语言支持:C\C++
- 开发工具支持:VS2005、VS2010
- 支持用户提供定时器卡进行定时/p>
- 具备丰富的外围板卡实时驱动和测试软件支持C\C++
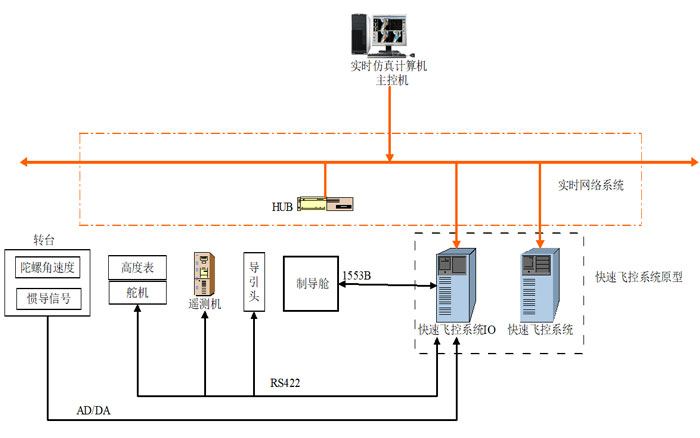
RTSim系统基于RTX(Windows嵌入式实时系统)实时系统、以Simulink为模型开发工具的快速原型系统。该系统能够快速将Simulink模型转化为RTX环境下实时模型,并能够实现Simulink模型自动编译与下载、仿真参数在线修改、仿真数据实时存储、自动分布仿真、仿真工程文件管理功能。该系统能够实现复杂大系统的闭环实时仿真,也能快速实现单个部件原型测试, 通过SimuLink自带模型仿真验证了该系统的可靠性、仿真的准确性。
使用MATLAB/Simulink/RTW、RtFly完成制导系统一体化开发环境设计:
● RTSim主控端将Simulink下建立的模型分割并结合RTW生成分布式模型代码并下载到仿真机上,仿真机并进行实时分布仿真
● 在原型设计师先后,使用编译器等工具,完成从标准C代码向目标硬件平台上的产品代码的转换工作
● 最后,使用真实物体对控制器进行测试
--
--
--
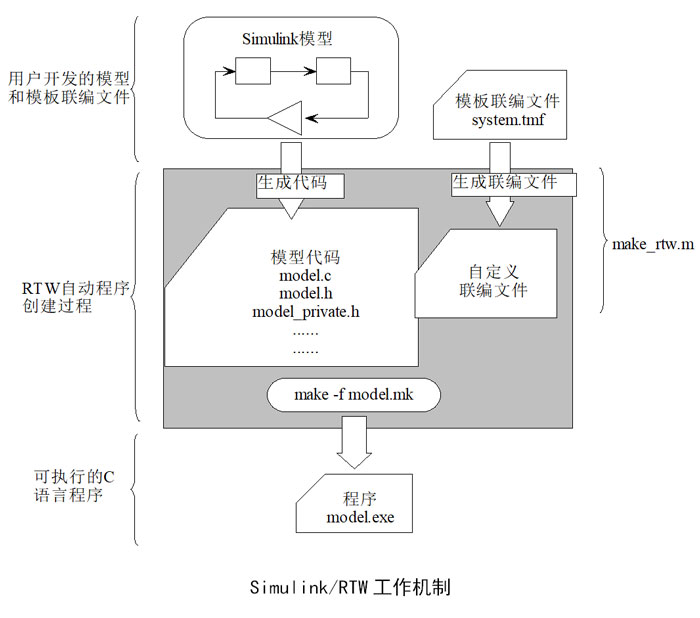
Simulink是一个用来对动态系统进行建模、仿真和分析的软件包,Simulink提供了丰富的模块库以帮助用户快速地建立动态系统模型。RTW是一个基于Simulink的代码自动生成环境,它能直接从Simulink的模型中产生优化的、可移植的和个性化的代码,并根据目标配置自动生成多种环境下的程序。RTW将用户所设计好的系统模型,在不须撰写任何程序代码的情形下,即可直接转换为原代码。
--
● 完全与Matlab/Simulink兼容
● 对仿真模型进行分割,自动编译和下载仿真模型,支持分布式仿真
● 不需要额外的处理器,在Windows98/NT/2000/XP操作系统的PC机上直接运行
● 单CPU计算机控制的闭环系统采样频率高达10KHZ
● 将板卡各端口做成相应的Simulink模块,通过Simulink直接对硬件端口进行读、写操作
● 直接在Simulink中实现控制器并组成闭环系统,使控制实际对象如仿真一样简单
● 实时控制同时也可以进行理论仿真以方便比较结果
● 控制器参数可在Simulink或快速原型系统窗口进行实时在线调
● 系统中的信号通过Simulink或快速原型系统示波器实时观测,实时结果可保存为数据文件
● 提供给与多种实时网络系统的分布仿真模式,包括基于VMIC等标准化接口,并在各种模式下保证仿真模型的一致性
● 支持计算机串口的确定性响应
● 采用XML作为数据以及消息存储、交互和显示
● 首先应用Simulink建立该系统仿真模型,确认数字仿真结果正确无误后,将模型设置为定步长仿真模式。
● 应用快速原型管理平台调用Simulink/RTW工具将模型生成实时代码,并应用VC++编译成RTX环境下RTSS实时运行程序,将模型配置信息(参数、IO、仿真条件)生成XML工程文件。
● 应用快速原型管理平台加载XML工程文件,完成仿真参数、仿真条件、数据文件等设置后,开始仿真。
--
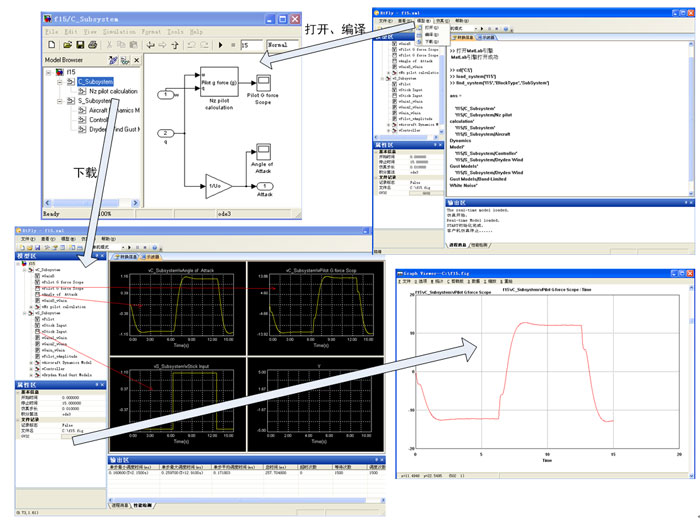
● RTSim系统运行监控界面

--
● 功能区。RTSim主要包括以下几个功能区:
- 模型区:当加载编译后的simulink模型后,将加载simulink模型按树形模式,包括子模型(只包含根一级)、变量、参数、示波器
- 属性区:对simulink实时模型的属性信息进行预览和修改,包括仿真起止时间、步长、积分算法、文件记录的信息、参数设置等。
- 示波器区:对simulink模型中的示波器进行一一映射
- 转换信息区:对simulink模型的加载、编译等进行显示
- 输出区:完成仿真性能检测以及simulink实时模型加载管理
● 菜单。主要由文件、模型与仿真组成。
- 文件。打开:打开RTSim工程文件;保存:保存修改后的RTSim工程文件
- 模型。打开:加载Simulink模型;编译:完成Simulink模型在RTX环境下的编译;加载:加载RTX环境下的Simulink模型
- 仿真。开始:开始仿真;停止:停止仿真
● 串口 RS232/422/485
● 模拟量转数字量 A/D
● 数字量转模拟量 D/A
● 数字输入输出 DIO
● 1553B
● VMIC5565
● 国防安全和军事工程
● 航空和航天仿真系统
● 机器人系统
● 机械工业自动化,智能制造
● 医疗仪器
● 卫星模型仿真系统
● 分布式实时仿真系统
● 实时仿真测试系统
● 飞行模拟器显控系统
● 分布式实时仿真和转台控制系统
---End---